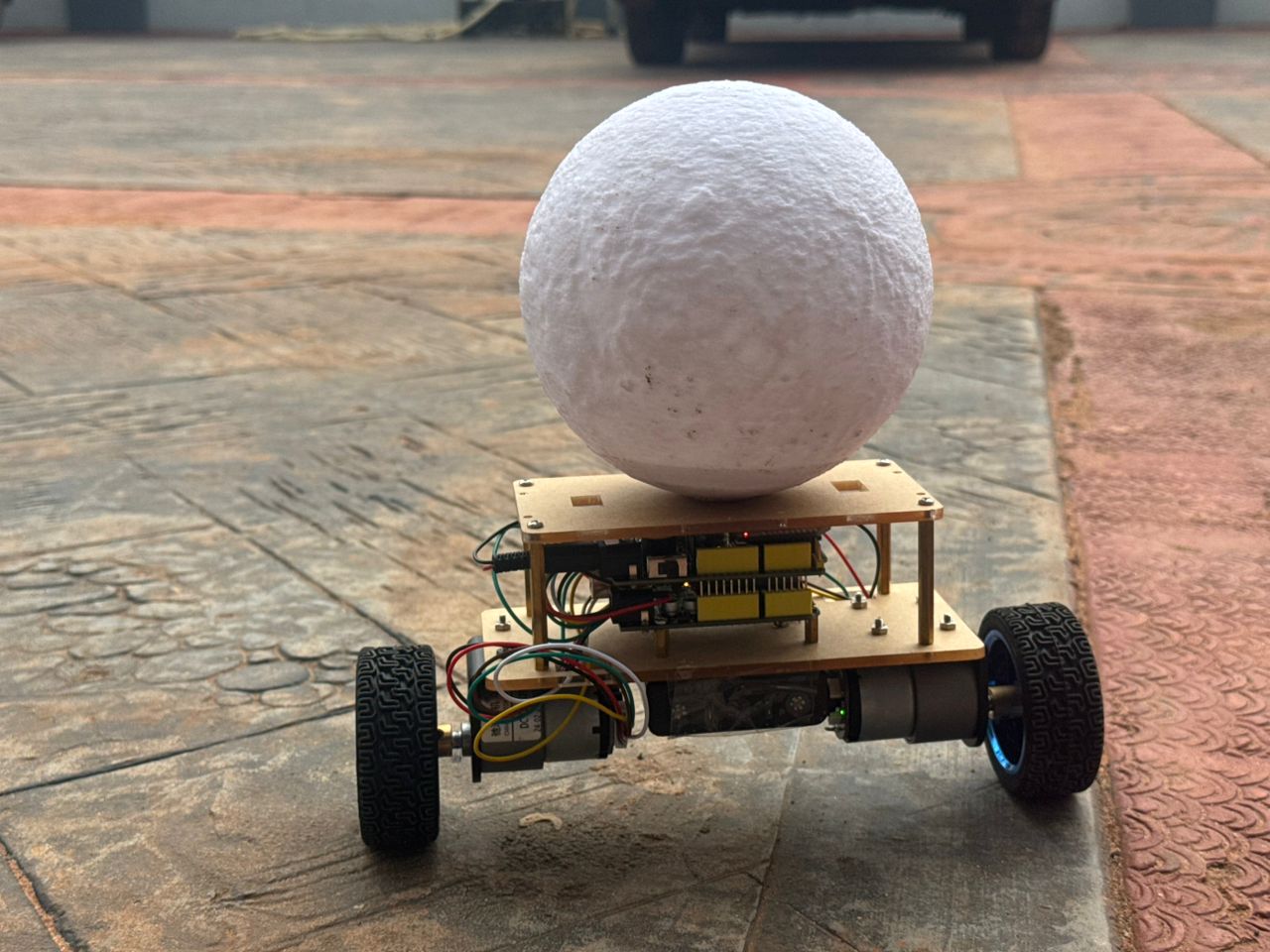
Hardware Components#
- Microcontroller: Arduino Uno
- Sensors: MPU6050 Sensor (for tilt measurement)
- Actuators: DC Motors
- Communication: Bluetooth Module
Key Challenges#
- Tuning PD control parameters to achieve stable balance was challenging due to sensor noise and environmental variations.
- Implemented a reinforcement learning algorithm to adjust the PD values dynamically, improving the robot’s stability.
- Analyzed sensor data and experimented with different control strategies to optimize performance.
Results#
- Successfully built a robot that maintains balance autonomously using reinforcement learning.
- Enhanced stability through real-time PD tuning, significantly reducing the robot’s tendency to tip over.
- Demonstrated the integration of AI techniques in constrained hardware environments.
Usage#
- The robot can operate in manual and balance modes.
- Use Bluetooth commands to control the robot remotely.
GitHub Repository#
View Full Project on GitHub